di Roberto Larcher *
REXASI-PRO è il nome di un progetto europeo in ambito Horizon Europe il cui acronimo sta per REliable & eXplainable Swarm Intelligence for People with Reduced mObility.
Obiettivo del progetto è realizzare un framework ingegneristico per sviluppare soluzioni basate su intelligenza artificiale che siano più sostenibili e affidabili, nell’ottica di una progettazione trustworthy-by-construction, essendo stata l’affidabilità degli algoritmi considerata, nel progetto, sin dalla fase della progettazione. In REXASI-PRO questi concetti sono declinati su algoritmi utili alla navigazione di una sedia a rotelle a guida autonoma, che deve essere sicura (ed essere percepita tale) sia dall’utente che la utilizza che dalle persone che in quello stesso ambiente si muovano. Deve essere una navigazione sociale. Questo termine indica, nel mondo della robotica e della AI, che la navigazione, o il movimento, di veicoli autonomi tenga conto delle informazioni che sono raccolte su ciò che le altre persone o oggetti stanno facendo nell’ambiente. Infatti, con la crescente introduzione dei robot mobili nella nostra vita quotidiana, diventa sempre più imperativo che questi robot navighino assieme alle persone in modo sicuro e socialmente accettabile, in particolare negli spazi condivisi.
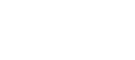
Il framework sviluppato in REXASI-PRO sarà dimostrato nella collaborazione tra una sedia a rotelle autonoma e robot volanti (droni), un sistema dedicato a persone con mobilità ridotta; la metodologia ne certificherà la robustezza .
I robot volanti (nell’immagine di copertina e di seguito, Courtesy di Hovering Solutions) di saranno dotati di soluzioni di apprendimento automatico esenti da bias per il rilevamento delle persone, soluzioni affidabili anche in caso di emergenza. In questo modo, REXASI-PRO renderà le soluzioni di intelligenza artificiale più ecologiche.
Il sito raccoglie le informazioni sul progetto, i Partner e i principali progressi nelle attività, tra cui gli use case, i casi cui il sistema sarà applicato.
REXASI-PRO è coordinato da SPINDOX Labs, di cui faccio parte e comprende un ricco partenariato di 11 partner dall’Italia, Germania, Regno Unito, Spagna, Svizzera e Belgio.

I Partner all’Assemblea 2023 a Trento (l’Autore è il secondo a sinistra)
Novità e scenari inediti
Il progetto REXASI-PRO presenta diversi punti di originalità, anche analizzando altre proposte analoghe e altre ricerche nel campo della Turstworthy AI, della IA affidabile e sicura. Ci sono molti casi in cui la IA viene applicata, per esempio in ambito medico, nella manifattura, quando vi siano macchinari che interagiscono con umani direttamente. Il caso di una sedia a rotelle che sostiene una persona con ridotte capacità motorie affiancandola ad altri mezzi tecnologici che la devono aiutare nella sua esperienza quotidiana è stato un punto di forza che ci ha permesso di ottenere dei punti in più nella valutazione rispetto ad altre proposte. è stata l’originalità del tema e della sua applicazione.
L’altro aspetto originale, secondo me, è la collaborazione continua con Scuola di Robotica, che da anni ha maturato esperienza di ricerche e studi di etica applicata ai robot, alle macchine autonome, alle applicazioni di IA. In questo modo, l’intero partenariato può discutere gli aspetti etici e di affidabilità rispetto alle persone, dall’utente a quelle nell’ambiente, lungo tutto il progetto, permettendo così di avere una direzione più organizzata allo sviluppo complessivo del progetto e del Machine Learning rispetto ad altri progetti e ricerche dove gli aspetti di etica della robotica e AI sono gestiti in modo discontinuo e con minore specializzazione sul tema.
L’interazione e le discussioni che abbiamo avuto sugli aspetti etici con Scuola di Robotica hanno aumentato in tutti i Partner la consapevolezza dell’importanza dei cosiddetti ethical requirement, le necessità etiche rispetto all’utente e agli umani che popolano l’ambiente in cui la persona sulla sedia a rotelle vive, migliorando la sensibilità su diversi punti e facendo sì che noi, che siamo i Coordinatori di REXASI-PRO, modulassimo a mano a mano tutte le azioni. Per esempio, il Work Package 6, in cui è presente la parte di orchestratore, era decisamente mirato all’ottimizzazione, ovvero cercare delle soluzioni che fossero meno impattanti possibili sull’ambiente. Dopo aver analizzato la situazione dal punto di vista etico, ci si è resi conto che la parte dell’orchestratore poteva essere fondamentale anche per riuscire a diffondere tra i vari componenti e gli umani che con il sistema REXASI-PRO interagiscono le informazioni necessarie per avere una maggiore comprensione del sistema e delle scelte che il sistema effettua grazie ai suoi algoritmi classici e di intelligenza Artificiale. Il ruolo dell’orchestratore come punto di riferimento dell’umano per dare un’interpretazione di quello che sta accadendo nel sistema nasce precisamente dall’interazioni sui problemi etici che abbiamo avuto con Scuola di Robotica e con tutti i partner.

La forma del Partenariato per un sistema complesso
La complessità del progetto risiede nel fatto che ogni aspetto tecnologico richiede un’attenzione a sé ma che ogni aspetto deve poi concorrere in un’azione unitaria.
Una delle qualità di REXASI-PRO sta nel Partenariato. Ogni Partner porta delle competenze e delle componenti teologiche che sono molto utili al progetto e tutti hanno bene in mente la direzione da intraprendere per migliorare quello che è già il loro bagaglio di expertise. Nella prima parte del progetto, impegno importante è stato quello di riuscire a trovare l’obiettivo che fosse comune a tutti i partner. Infatti, all’inizio ognuno aveva chiaro che cosa avrebbe dovuto fare con la propria tecnologia ma occorreva trovare un disegno complessivo che le mettesse assieme e che permettesse di rendere ancora più confortevole l’utilizzo del sistema – che dal punto di vista dell’utente è solo la sedia a rotelle – ma occorre il contributo di tutti gli altri sistemi per assicurare i benefici all’utente e alle persone che lo assistono e sono con lui/lei o nell’ambiente.
Da questo punto di vista è stato fatto un grane sforzo anche sulla parte di analisi del sistema e di Safety Analysis per capire quali fossero le criticità nel caso una o poche delle componenti – per esempio, se solo la sedia a rotelle – fossero prese in considerazione.
Importanti sono state sia l’analisi del fabbisogno dell’utente per quanto riguarda la sedia a rotelle – che, anche dopo la conclusione del progetto vuole diventare un prodotto che trova la sua evoluzione anche senza il sistema complessivo – che l’individuazione degli scenari dove invece è necessario l’intervento di tutto il sistema per aumentare la sicurezza dell’utente, delle persone intorno e dell’ambiente.
Gli apporti provenienti dall’automotive
La navigazione della sedia attiva sia i sistemi di percezione ed elaborazione dei dati che afferiscono al controllo automatico classico della macchina sia gli algoritmi di Intelligenza Artificiale di navigazione sociale che guidano e muovono la sedia in un ambiente antropico. In questo caso, ci colleghiamo alle ricerche sui veicoli autonomi, poiché i layer di acquisizione, elaborazione e attuazione dei risultati sono simili a quelli impiegati nell’automotive autonomo. Ovviamente i problemi di sicurezza nel nostro caso sono ridimensionati data la massa e la velocità di punta della sedia a rotelle, entrambe estremamente di molto inferiori a quelle gestite per i veicoli del mondo dell’automotive.
Dal mondo dell’automotive però si attinge anche per gli aspetti di verifica e certificazione delle soluzioni di intelligenza artificiale. Nel progetto, ad esempio, si sviluppa una parte in cui vogliamo impiegare la simulazione per avere un miglior addestramento delle reti neurali che gestiscono la sedia. Questo risulta utile sia per raccogliere dati, che per testare gli algoritmi della sedia a rotelle in circostanze che sono difficilmente riproducibili (causa costo o pericolosità). In questo abbiamo optato per utilizzare strumenti sviluppati in ambito automotive ed adattarli al nostro caso. Ci affidiamo dunque all’estensione di linguaggi esistenti per la descrizione degli scenari di simulazione e lo stesso facciamo per quanto riguarda il simulatore necessario per far evolvere questi scenari ed identificare possibili situazioni non correttamente gestite.
Anche il lavoro di Safety Analysis si basa su standard che vengono dall’automotive, che è stato pioniere negli studi sulla sicurezza; ovviamente noi adattiamo le metodologie al nostro contesto.
I prossimi passi.
Dopo un anno in cui abbiamo definito precisamente tutti i requisiti, dovremmo lavorare per ottenere un’implementazione che rispetti tutte le richieste espresse negli use case e farlo integrando tutte le componenti tecnologiche del progetto. L’obiettivo è particolarmente sfidante perché tutte le componenti tecnologiche richiedono numerose interazioni. Data l’internazionalità del partenariato, le occasioni di incontro e verifica complessiva del sistema dovranno essere pianificate con cura, consentendo un più intenso lavoro di preparazione nell’immediatezza degli incontri programmati, il prossimo dei quali sarà a Genova nel mese di febbraio, nella sede del CNR dove a fine progetto saranno organizzati gli use case dimostrativi.
* Technical Project Leader presso SpindoxLabs, la società controllata da Spindox che gestisce i suoi progetti più innovativi.