Nowadays many different types of robots are applied not only in case of highly disabling diseases such as stroke, Parkinson’s, multiple sclerosis, spinal cord injury and head trauma, but also to perform rehabilitation training in an innovative, fun and friendly way.
More and more in the rehabilitation field are being introduced technologies to support the activities of specialists, doctors and physical therapists; the future and the challenge of rehabilitation consists in the development of robotics.
There are different categories of robots for rehabilitation and assistance: exoskeletons, endpoint robots, humanoid robots and many others. Focusing on the category of humanoid robots, we can see the use of robots such as Nao, Pepper, Sanbot, Paro, Kaspar and many others with the elderly, with dementia such as Alzheimer’s or with physical problems such as Sarcopenia, but also with children with autism spectrum disorder, neuromuscular diseases and other disabilities.
In this article we will describe two different projects conducted by Scuola di Robotica, which see the application of two different types of humanoid robots (Pepper and Nao) in two different rehabilitation and care contexts; in the first case we will talk about the robot Pepper as a rehabilitator, controller and demonstrator of exercises with subjects who have an patology called Sarcopenia, in the second case we will see the application of humanoid robot Nao as a trainer and entertainer with people with Alzheimer’s disease.
The humanoid robot Pepper, produced by the French company Soft Bank Robotics, is the first humanoid robot able to recognize the human face and emotions making the interaction with the people around it as natural as possible; it is equipped with a tablet, several tactile sensors, lasers and cameras that allow it to interact with the surrounding environment.
Pepper has been chosen by the Scuola di Robotica, the Galliera Hospital of Genoa and the University of Genoa, as the robot instructor and rehabilitator to guide groups of people to perform a series of physical exercises specifically designed to contrast the pathology called Sarcopenia. Project R.O.S.A is the project involving the humanoid robot Pepper, School of Robotics, the Department of Geriatrics, Orthogeriatrics and Rehabilitation (CUROGE) of the Galliera Hospital in Genoa and the Departments of Engineering (DIBRIS) and Architecture and Design of the University of Genoa.
The term Sarcopenia is used to describe a progressive and generalized loss of muscle mass accompanied by a decline in muscle strength and performace, related to increasing age [V. Malafarina, F. Úriz-Otano, R. Iniesta, and L. Gil-Guerrero, “Sarcopenia in the elderly: diagnosis, physiopathology and treatment,” Maturitas, vol. 71, no. 2, pp. 109-114, 2012].
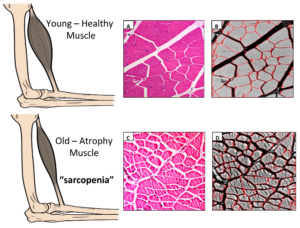
Sarcopenia is a pathology that is increasing significantly, in correlation with the rapid expansion of the aging population. Rehabilitation research shows that it is important, to prevent and counteract this loss, to perform physical exercises involving the upper and lower limbs. Only with a periodic fixical activity will it be possible to improve the living conditions and therefore the autonomy of the elderly. However, people decide on their own to perform regular training and exercises, without receiving any kind of external co-involvement. Research and implementation of innovative techniques for prevention and therapeutic intervention are current challenges due to the increasing number of people affected by Sarcopenia and related complications and disabilities.
Thanks to the support and experience of Scuola di Robotica, which has active countless projects that see the application of humanoid robots in clinical, educational and hospitality in public and private places, R.O.S.A project proposes an innovative method to prevent and counteract the onset of Sarcopenia.
Specific physical exercises have been proposed that involve the movement of upper and lower limbs, and these, instead of being performed independently at home, are carried out interactively under the tutorship of the humanoid robot Pepper. Specifically, a platform has been designed that sees the application of: a humanoid robot to illustrate, demonstrate and control that a group of subjects perform the proposed exercises; an external camera to capture video of the subjects present at the session; a screen, which, being larger than the tablet with which Pepper is equipped, helps the robot to provide clear graphic instructions on how to perform the exercises correctly, presenting demonstration videos of experienced physiotherapists.

The robot has been programmed to perform the exercises at the same time as the people and monitor the execution and eventual completion of the exercises, providing real time feedback during each session.
To ensure proper monitoring of the movements effected by each person, an external camera is used that acquires video data and through a markerless analysis technique, which reconstructs the skeleton of the person and monitors the movement of all joints of the body, evaluates whether and how the movement has been performed and completed.

The robot checks in real time that all participants fully perform all the required exercises and encourages participants who stop or slow down the execution of the exercises.
Then, thanks to a detailed off-line processing of the video recorded during the session, it is possible to obtain information on the quality of the execution, highlighting technical parameters on the number of movements performed; the symmetry between the right and left movements; the range of movement of the most relevant joints and the synchronization between the different subjects and the robot, this last parameter allows us to verify if the participants follow the instructions and the pace given by the robot.
The results obtained in the first experimentation sessions of the platform with sarcopenic subjects at the Galliera Hospital showed a high degree of acceptance by the subjects undergoing the training sessions and a high synchronization of movements between all subjects and the robot.
The characteristics of the robot and its shape proved to be suitable for the study: people found Pepper an excellent trainer, able to show them all the exercises in a very understandable way and to guide them in a fun way to complete the protocol while maintaining the correct timing.
Humanoid robots, however, are not only applied as “fiotherapists” in rehabilitation and physical training contexts; recently in many cases humanoid robots have been adopted for their modularity of interaction and can be used both to decrease apathy and for fun and also to support some learning activities and memory reinforcement.
In this regard, let’s talk about the second project that sees the application of the humanoid robot Nao with subjects presenting Alzheimer’s disease. In this context, the humanoid robot Nao is employed as an entertainment tool and a vehicle for games and cognition support.
The project took place in Italy at Il Paese Ritrovato in Monza, a small town where people with Alzheimer’s lead a normal life, feeling at home while receiving the necessary attention.
“A real place that wants to slow down cognitive decline and minimize disabilities in daily life, offering the resident person the opportunity to continue to live a rich life appropriate to their abilities, desires and needs.”
The goal of the project was to provide the residents of the Paese Ritrovato with play activities, cognitive support workshops and smart games made with the humanoid robot Nao.
The recipients of the project were the residents of Il Paese Ritrovato, who together with the operators, therapists and psychologists carried out various types of group activities. The activities included phases of knowledge and verbal dialogue between residents and games including: Guess the animal, Finish the proverb, Sing, Remember some recipes and exercise activities.

At the end of the first phase of experimentation, as reported by the Dramatherapist Paola Perfetti who attended the activity sessions with the residents: “The impact with the residents has been positive since the moment we took it out of the box in front of them. We can define it as a character who creates well-being, so nice that even the operator who accompanies it is nice. Nao is able to stimulate new experimentation, not only in a group work but also individually, he is able to strengthen the relationship between the resident and the operator. Nao is the medium, the emotional mediator. The residents of Il Paese Ritrovato see it as funny, they see it as human, and that fosters interaction.”
We well understood that the use of new technologies and humanoid robots to support frail and elderly users has produced excellent and encouraging results for future applications.
Donwload and Share